



“人工智能+”行動
時值兩會,十四屆全國人大二次會議政府工作報告中提到,要深入推進數字經濟創新發展,積極推進數字產業化、產業數字化,促進數字技術和實體經濟深度融合。深化大數據、人工智能等研發應用,開展“人工智能 +”行動,打造具有國際競爭力的數字產業集群。
具身智能
具身智能的核心概念是將高級的人工智能,集成到機器人的物理形態中。“具身智能”,即指一種基于物理身體進行感知和行動的智能系統,其通過智能體與環境的交互獲取信息、理解問題、做出決策并實現行動,從而產生智能行為和適應性。
一般認為具身智能具有幾個核心要素,第一是本體,作為實際的執行者,是在物理或者虛擬世界進行感知和任務執行的機構;第二個是智能體,是具身于本體之上的智能核心,負責感知、理解、決策、控制等的核心工作;第三是數據;第四是學習和進化架構。
自主導航定位及無人巡檢方案
隨著科技的持續創新,機器人本體也愈發多樣,如四足機器人、復合機器人、人形機器人等。立得空間曾為國家電網設計整套基于電纜隧道復雜場景下的自主導航定位及無人巡檢方案,圍繞數字化全景建模、智能化感知融合、無人化巡視檢測、立體化集中監控、大數據貫通應用等關鍵技術快速推進,攻克了隧道數字化模型、機器人自主導航、自組網感知通信三大核心技術。
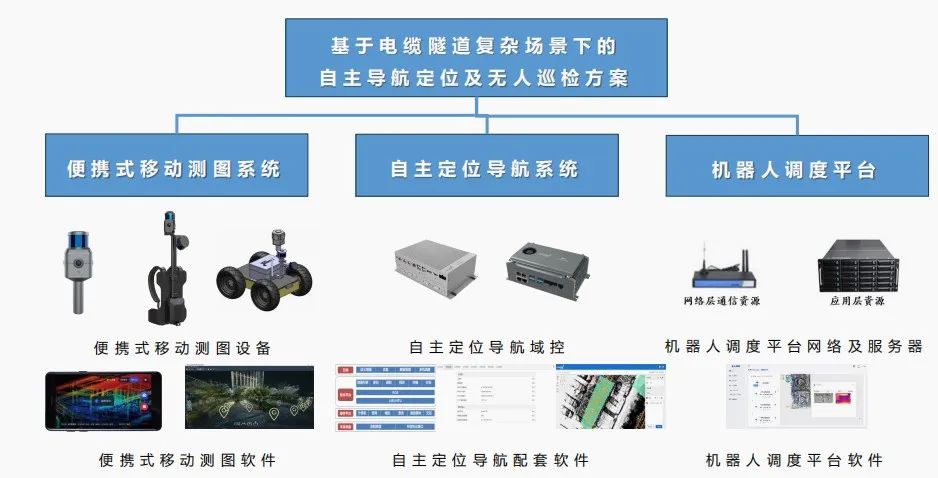
其中運用到四足機器人,基于“北斗”衛星實時定位,因其體量小可在復雜且狹小的隧道等環境路網自主導航進行作業,解決了地下隧道環境復雜、作業面狹窄、無GNSS信號、日常工作風險高效率低等問題,實現快速制作室內、室外高精地圖、實現地下空間、危險等復雜場景無人自主探索、自主導航定位等功能,最終實現由機器助人到機器代人的實質性改變。

“路霸”機器人定位導航系統(PNS)
立得空間“路霸”機器人定位導航系統(PNS)與具身智能的核心要素具有異曲同工之妙,由立得空間憑借領先的移動測量技術和SLAM算法,可為任何機器人配套提供定位導航系統,具有測量、感知、導航、定位、控制等功能,是實現機器人深度感知、智能決策的核心器件。

立得空間成功探索人工智能+機器人、人工智能+自動駕駛、人工智能+數字孿生等多種模式,未來立得空間也將致力于技術創新和服務提升,發揮企業優勢與技術優勢,助力企業數字化轉型升級,為數字經濟發展貢獻自己的力量!
 返回列表
返回列表